成果简介:
便携关节式坐标测量机是精密几何量测量仪器,该仪器采用串联式结构,主体结构含有 3 对旋转关节,可实现自由旋转,不同型号仪器的测量范围为 1.2m 至 3.6m,测量精度介于0.049mm至0.119mm 。该仪器具有测量精度高、适用于现场测量和快速测量的优点,从而广泛应用在大科学工程、汽车、航空航天、模具制造等领域。
技术特点及技术指标:
便携关节式坐标测量机具有以下关键核心技术:
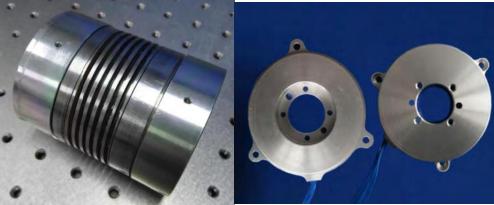
① 精密机械结构:便携关节式坐标测量机的机械结构主要 3 对互相垂直的旋转关节通过高强度的碳纤维管连接而成的。采用滑环技术解决旋转关节在 360°过程中绕线问题;研制力平衡系统,安装在第一对关节内,克服后面 2对关节的自重对测量精度的影响和增加了操作人员的舒适性。
② 角度传感器测角误差修正:借助自准直仪和 23 面棱体搭建了测角误差检测系统,使用傅里叶级数展开-遗传算法优化 BP 神经网络方法,显著提高了圆光栅传感器在不同环境温度下的角度 测量精度。
③ 多参数建模:采用广义误差模型建立关节式坐标测量机的测量模型,进一步提高了模型精度。
④ 3D标准件:设计了一款 3D 标准件,相较于量块、球杆、步距规等标准件为便携关节式坐标测量机的结构参数标定提供更多标准量,以提高其测量精度。
⑤ 标定算法:为了克服便携关节式坐标测量机的结构参数辨识过程中存在病态问题,提出一种基于粒子群算法与同步干扰随机逼近算法相结合的混合算法用于测量机的结构参数标定。
⑥ 纳米时栅角度传感器:研发世界首创的精密时栅角度传感器,研究基于 SOPC 的纳米时栅电路小型化技术,开发输出绝对位移值的 SSI 接口电路和软件,取代圆光栅传感器。
⑦ 光学测头结构优化:建立线结构光视觉系统的数学模型,分析各结构参数对测量精度的影响,通过仿真分析的方法对结构参数优化,为高性能的光学扫描测头集成提供理论支撑。
⑧ 手眼关系标定技术:研究手眼标定的基本原理,建立手眼标定中的旋转关系,给出了手眼标定的求解方法。为光学扫描测头集成到便携关节式坐标测量机上,建立光学扫描测头和关节式坐标测量机两者之间的关系提 供理论支撑。
⑨ 几何测量软件系统开发:开发了具有常见几何特征测试的几何测量软件,能够实现直线、 球、平面等特征的拟合,并给出拟合结果以及拟合精度。
技术指标包含以下内容:
已研制5款测量范围为1.2m-3.6m的便携关节式坐标测量机,其单点重复性介于±0.018- 0.036mm,长度测量重复性 0.049-0.119mm;成功研制安装在便携关节式坐标测量机旋转关节内的绝对式时栅角度传感器,其测量精度为±1.7″;安装于仪器的光学扫描测头,测量精度为 0.009mm,扫描速度为 6000 点/秒。
相较于国内外同类产品,本团队开发的便携关节式坐标测量机具有完全的自主知识产权,性能基本达到国际先进水平,打破了国外垄断。研制了适用于便携关节式坐标测量机的精密时栅角度传感器,取代圆光栅角度传感器,提高了测角精度,降低成本。
应用领域:
团队研制的便携关节式坐标测量机已在奇瑞汽车股份有限公司、中航成飞民用飞机有限责任公司、安徽计量科学研究院、中国科学院合肥物质研究院开展应用。在奇瑞汽车股份有限公司主要针对汽车行业模具标定、焊接夹具定位和人机工程开展测试工作;在中航成飞民用飞机有限责任公司对飞机舱门及工装进行测量;在安徽计量科学研究院对大型轴类零部件进行测量;在中国科学院合 肥物质研究院使用便携关节式坐标测量机对 EAST 核聚变装置内部关键部件上下偏滤器进行装配定位准直测量。
便携关节式坐标测量机主要面对的行业为汽车制造、航空航天、大型零件加工等制造业。该仪器应用广泛,但基本上被国外产品垄断,价格昂贵且维护不便,因此本团队研制的高精度便携关节式坐标测量机具有广阔的推广前景。
四、投入需求:
成果产业化需投入资金约 600万元,用于以下方面:
① 研发、改进新技术,即科研投入;② 购买相关设备和软件搭建生产和检测线,原材料的外包费用;③ 市场开拓,包括营销活动及人员安排、产品配套技术服务等;④ 办公管理,包括办公 场所租用、办公用品的购买等;⑤ 人员工资。
预计需要办公区和仪器装配区 300 平方米,水电等常规供应。
图 1 力平衡系统 图 2 时栅角度传感器
图 3 便携关节式坐标测量机实物图
图 4 便携关节臂式坐标测量机的应用
专利授权及申请情况:
1、国家发明专利:一种基于虚拟球的空间标定体及其标定方法(授权)
2、国家发明专利:圆光栅安装时产生二维微小角度的测量装置及方法(授权)
3、国家发明专利:用于便携关节式坐标测量机误差标定的 3D 标定场(授权)
4、国家发明专利:大长径比管件内径多参数测量装置(授权)
5、国家发明专利:大长径比管件内径多参数测量装置及其测量方法(授权)
6、国家发明专利:微型尺蠖式压电驱动旋转关节机构(授权)
7、国家发明专利:一种空间两球心距离测量仪及其测量方法(授权)
8、国家发明专利:一种自助实训平台(授权)
9、国家发明专利:一种微型冲击式压电驱动的耦合装置(授权)
10、国家发明专利:基于便携关节式坐标测量机圆光栅测角误差的自校准方法(授权)
11、国家发明专利:坐标测量机测量路径规划方法(授权)
12、国家发明专利:一种基于误差源分析的圆光栅传感器测角误差修正方法(授权)
13、国家发明专利:基于聚焦二值图案的快速灰度条纹合成方法(授权)
14 、国家发明专利:一种圆光栅测角误差补偿方法(授权)
15、国家发明专利:一种利用内置压簧实现力平衡和机构限位的摆动关节(授权)
16、国家发明专利:一种平行双关节坐标测量机的 Z 轴阿贝误差修正方法(授权)
17、国家发明专利:用于便携关节式坐标测量机标定的 O 型标准件(授权)
18、国家发明专利:一种基于 BP 神经网络的圆光栅传感器测角误差修正方法(授 权)
19、国家发明专利:一种关节式坐标测量机的底座紧固机构(授权)
20、软件著作权:便携关节式坐标测量机标定数据采集软件 V2.0.1(登记)
成果受资助及获奖情况:
1、国家重大科学仪器设备开发专项,2013YQ220893,便携关节式坐标测量机开发 与应用,2013-12 至 2018-06;
2、国家自然科学基金面上项目,51375137,三维阿贝误差补偿技术在关节式坐标 测量机中的应用研究,2014-01 至 2017-12;
3、国家自然科学基金面上项目,51075117,柔性坐标测量机创新精度理论与应用 技术研究,2011-01 至 2013-12;
4、国家自然科学基金面上项目,50775062,平行双关节坐标测量机关键技术研究, 2008-01 至 2010-12;
安徽省科学技术奖证书
仪器仪表学会科学技术奖证书
技术成熟程度: 已在产业中应用
拟合作方式:☑整体转让 ☑技术许可 ☑作价入股 ☑合作开发